Research
The THinC Lab’s research is applied to several key areas, advancing the frontiers of autonomous systems and human-robot interaction. We are working on the following projects to address key challenges within these research areas:
Active Projects
Control of Heterogeneous Traffic Systems.
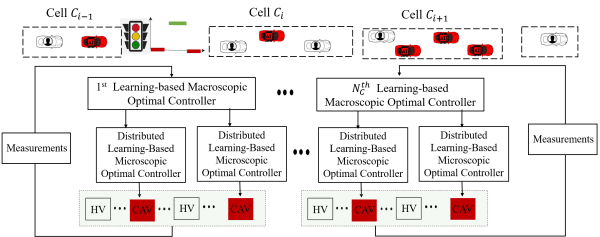
This project aims to develop a framework for tractable modeling and optimal control of a heterogeneous traffic network consisting of autonomous and human-driven vehicles. The details of this project are structured around two primary research objectives, which are listed below.
Project Deatials
The two goals of the project are
- Development of Distributed Learning-Based Predictive Control Algorithms at the Macroscopic Level: To improve the aggregated behavior of a heterogeneous traffic network, we are developing distributed learning- and scenario-based model predictive control (DLB-sMPC) methods wherein functional variational Bayesian neural networks (BNNs) is used to model state- and input-dependent uncertainty online. Moreover, to enhance the computational efficiencies of the proposed DLB-sMPC, we are developing a set of distributed optimization algorithms using the distributed Alternating Direction Method of Multipliers and Primal Decomposition approaches.
- Development of Distributed Cautious Model Predictive Control-Based Algorithms at Microscopic Level: At the lower level, to balance between the closed-loop performance and safety (collision avoidance) on the road, we are developing distributed cautious model predictive control (MPC) based approaches for heterogeneous multi-agent systems. The controller aims to ensure safety and improve the tracking of the desired reference (set by the macroscopic-level controller) for the heterogeneous multi-agent system in the presence of modeling uncertainty and reactive obstacles. The effectiveness of the proposed learning-based scalable predictive control framework will be validated on an integrated model of a heterogeneous traffic network for both urban and highway scenarios using PTV-VISSIM software.
Learning and Leveraging Human-Robot Co-Adaptation Policies for Resolving a Conflict.
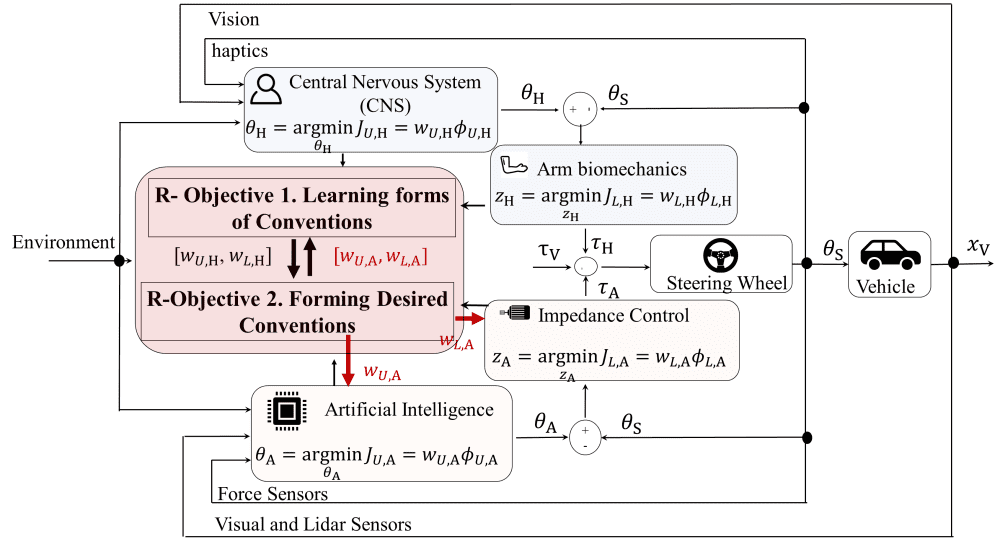
Humans may gravitate to different strategies for resolving a conflict. A hypothesis behind the seamless human-human collaboration is that humans can adaptively form conventions. A convention is defined as a low-dimensional shared representation that captures the interaction. However, forming conventions in human-robot teams is difficult because the human partner is a non-stationary agent. This project aims to design and test adaptable and convention-based control transfer strategies to enhance joint driving performance and subjective assessment of driving in the presence of a conflict between the driver and the automation system. To this end, two research objectives are defined for this project.
Project Details
- Learning forms of Conventions. The first objective focuses on creating a modular structure that separates partner-specific conventions from task-dependent representations and uses this structure to learn different forms of conventions. To this end, we are developing functional variational Bayesian neural networks to learn the state- and input-dependent uncertainty in the human-automation interaction. Furthermore, we design Bayesian-based inverse reinforcement and transfer learning approaches to identify the human strategies for resolving a conflict in a shared control paradigm.
- Forming Desired Conventions. The second objective focuses on developing a Bayesian model predictive controller for the automation system to reach a desirable form of conventions. Additionally, we propose to characterize maps from the space of conventions to outcomes of human-automation interaction. These maps will guide the automation system on reacting to (or influencing) the driver to form desirable conventions. We assess the performance of our automation system in (i) selecting an appropriate handover strategy for resolving a conflict when interacting with different drivers and (ii) selecting an appropriate handover strategy for resolving different forms of conflicts (e.g., reverse intents, too much or too little inputs) when interacting with an individual driver.
Developing Ad-Hoc Teamwork Strategies for Human-Robot Collaboration.
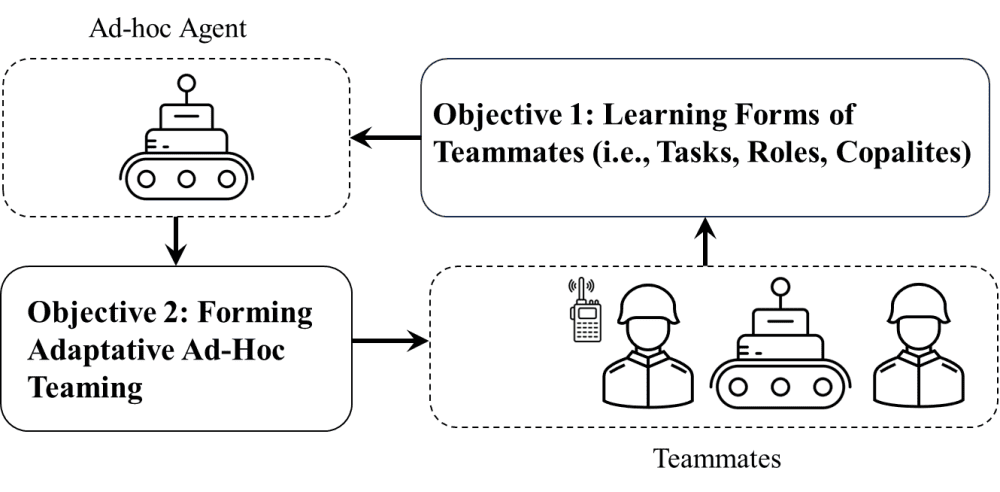
This project aims to enable collaborative ad-hoc teamwork between teams of humans and robots wherein an intelligent agent, whether human or robot, must successfully collaborate with unfamiliar teammates without any prior coordination or communication protocol.
This partnership is especially vital in various military scenarios where mission objectives may dynamically evolve, team members have diverse skill sets, and decision-making needs to occur in real-time. Key challenges include adapting to non-stationary human behavior, managing mixed objectives within the team, and overcoming limited perceptual capabilities in open and partially observable teams.
Project Details
- Modeling Teammates and Missions. The first objective aims to develop a sequential learning framework that enables the ad-hoc agent to model its robots and human teammates’ mission, strategies, and capabilities using Bayesian inference and inverse reinforcement learning.
- Optimizing Ad-Hoc Team Collaboration: The second objective aims to create a Bayesian predictive planner and communication module to facilitate seamless teamwork and effective interaction between the ad-hoc agent and its human teammates. The developed algorithms will be tested in a robot-car soccer game involving human-in-the-loop participation. Performance will be assessed based on mission success rate, collaboration efficiency, adaptability, communication effectiveness, and scalability.
Past Projects
Automated Shuttle Pilot at UNC Charlotte

The rapid advancement in driverless technology has led to the deployment of automated shuttles. This project evaluated an automated shuttle pilot conducted on the University of North Carolina at Charlotte campus from June to December 2023. The primary objectives of this project is here
Project Details
The goals of the project are
- Surveying Rider Perceptions: Capturing the perceptions of automated shuttle riders and non-riders regarding safety, comfort, and convenience. This data helps understand how the public perceives automated systems within mixed-traffic environments.
- Evaluating Operational and Safety Performance: Researching the shuttle’s performance under various conditions, including high and low traffic volumes, heterogeneous traffic with pedestrians and other non-vehicle users, and different geometric and environmental conditions.
- Providing Recommendations for Broader Implementation: Based on the data collected, this project recommends implementing automated shuttles to enhance operational efficiency, safety, and rider satisfaction.